Микроконтроллеры фирмы ATMEL - ATMegaXX
схемы, программы, исходники
|
Микроконтроллеры фирмы ATMEL - ATMegaXX схемы, программы, исходники |
|
|
Для развития сюжета нам потребуется: 1) Голова (желательно с творческими замыслами); 2) Руки (желательно не из жопы растущие и не под хер заточенные); 3) Паяльные приспособления с паяльным агрегатом, комплектующие (обращайтесь в Чип и Дип), блок питания на 5В (стабилизированный), блок питания на 9-15В (зависит от вашей исполнительной части). Учтите – паять будем микросхемы, так что подумайте о заземлении и статике; 4) Исполнительное устройство, в механическом варианте (чтобы было понятнее чего и для чего мы творим); 5) Компьютер с LPT портом (для программирования микроконтроллера); 6) Компьютер с COM или USB портом, для управления микроконтроллером, я использую USB – порт со шнурком от сотового телефона на базе микросхемы PL2303. Шнурок для сопряжения с COM-портом, на микросхеме МАХ232 ваяйте сами, информации по ней в Инете – хоть жопой жуй. Учтите – сигналы с переходников инвертированные (устройства на транзисторах и сопротивлениях не прокатят); 7) Программный набор: Borland C++ Builder v.6 (для создания более-менее приемлемой проги для управления микроконтроллером), PonyProg2000 (для заливки прошивки в микроконтроллер), FastAVR v4 или mikroBasicAVR (программировать микроконтроллер будем на языке BASIC), Proteus 6 Professional (для проверки работоспособности микроконтроллера в виртуале) и EAGLE 4.16 (для разводки плат). Где Вы все это наберете – меня не волнует, но гарантировать работоспособность я могу только с ЭТИМ набором; 8) Охуенный мешок терпения.
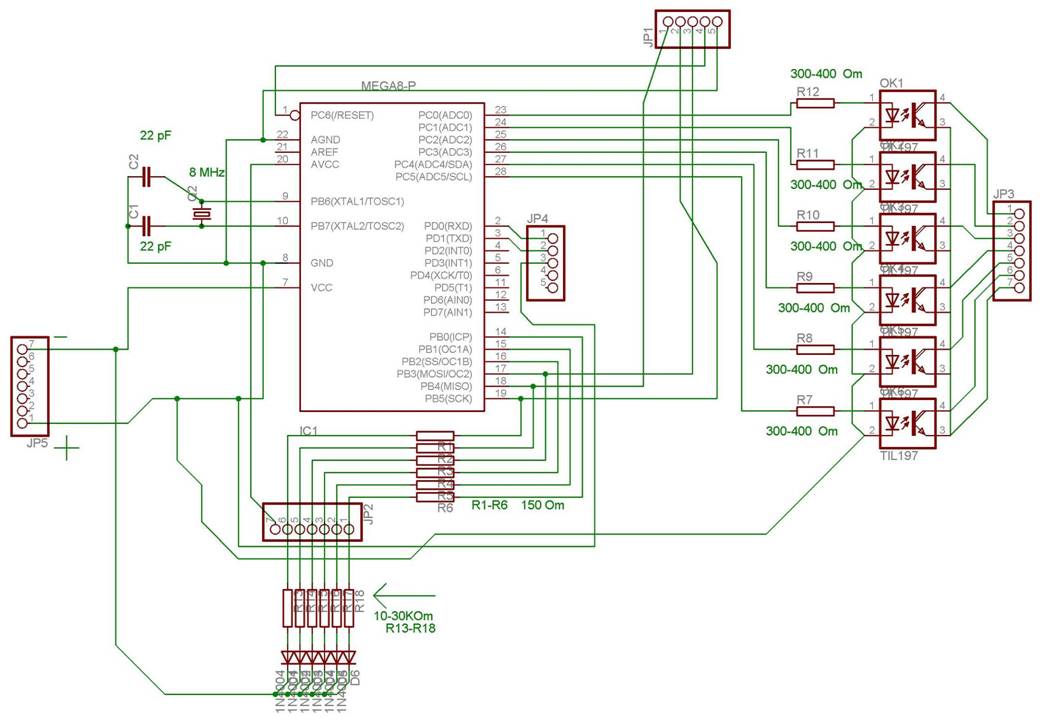
Начнем с проектирования печатной платы. Для образца предлагаю использовать мои творческие позывы: 1) Принципиальная схема на базе микроконтроллера ATMega8.
1 – MISO 2 – SCK 3 – MOSI 4 – RESET 5 – GND; JP2 – разъем для датчиков. В нашем случае датчиками служат микропереключатели, где замыкание происходит на контакт №7 (пример: 1-7, 2-7, 3-7 и т.д.). Да-да именно так просто;
1 – RxD 2 – TxD 3 – GND (земля или общий минус);
P5 – разъем питания (1 - +5В, 7- GND)
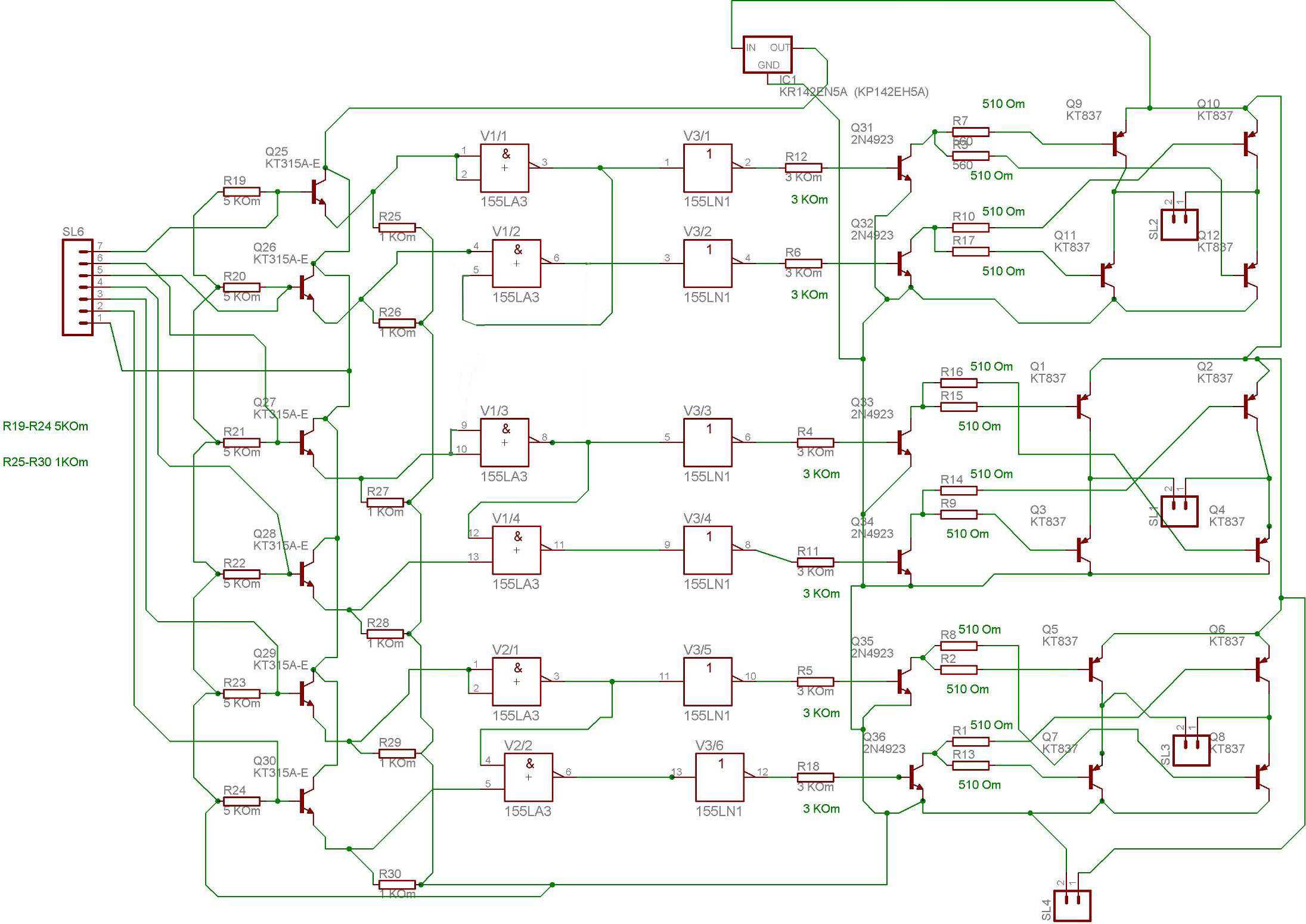
2) Принципиальная схема исполнительной силовой части:
SL6 – разъем от JP3 SL6 JP3 1 7 2 6 3 5 4 4 5 3 6 2 7 1 Микросхемы 155ЛА3 и 155ЛН1 требуются чтобы исключить короткое замыкание на силовых транзисторах КТ837Ф, а принципиально можно и без микросхем обойтись. В данной схеме можно увеличить количество исполнительных механизмов путем добавления дополнительных цепей (R23, R24, Q29, Q30, R29, R30, V1/2, V2/2, V3/5, V3/6, R5, R18, Q35, Q36, R8, R2, R1, R13, Q5, Q7, Q6, Q8). В общем как это получилось наглядно на фотографиях:
|