В настоящее время информация, выложенная на этой странице, устарела и особого интереса не представляет. На выложеном ниже видео, представлена более интересная и новая разработка.
Если заинтересовало - как это все собрать, то стоит перейти по следующей ссылке:
Если же вам интересна старая информация, то читайте дальше. Там все оставлено как есть.
Hack & Mod Robosapien V2.
Управление Robosapien V2 с
копьютера.
Сначала немного
вступления.
- Что такое Robosapien V2 ? Это
довольно тупая куча электронных компонентов,
собранных в одном пластиковом корпусе. Почему
тупая? Да потому, что разработчики так и не
определились с конечным потребителем. Для
малышей игрушка весьма сложна в управлении, для
взрослых (ну если они только не принадлежат к
классу Гомеров Симсонов) весьма примитивна по
набору команд. Собственно игрушка начинается с
подачи команды DEMO и... на этом и заканчивается.
Чтобы совсем не соскучиться, мной было принято
решение о подключении (точнее - управлении) этого
девайса к компьютеру. Сразу скажу - полноценного
общения с устройством - не получится. По
неизвестным населению планеты Земля
обстоятельствам, разработчики не включили столь
полезную функцию! Т.е. - без вмешательства в
электронную схему двусторонний обмен НЕВОЗМОЖЕН
(кстати это относится и к более
"продвинутой" модели - Robosapien RS). Так что, без
ковыряния паяльником в недрах устройства, нам
остается только односторонний обмен, а именно -
подача команд на устройство. В поисках
информации мной были просмотрены все (доступные
мне) ресурсы русского Инета и вот что я вам скажу -
на русскоязычных ресурсах ловить нечего. Все что
может сказать "россиянин современный" это -
"поищи в гугле по словам...", "хватит
флудить...", "эта тема уже обсуждалась
(обсуждается) в соседней ветке..." и ВСЕ! Или
наоборот - натыкаешься на такие зубодробительные
исходники... мама миа. Честно говоря такой
результат меня нисколько не расстроил, этого я и
ожидал. Пришлось лезть в БОЛЬШОЙ ИНЕТ. Оттуда
была почерпнуто следующее: ИК-команды, ИК-коды,
принципы передачи-приема ИК сигналов, программа
"RoboDance" и все. Для первого этапа хватило. Ну...
с богом.
Подключение:
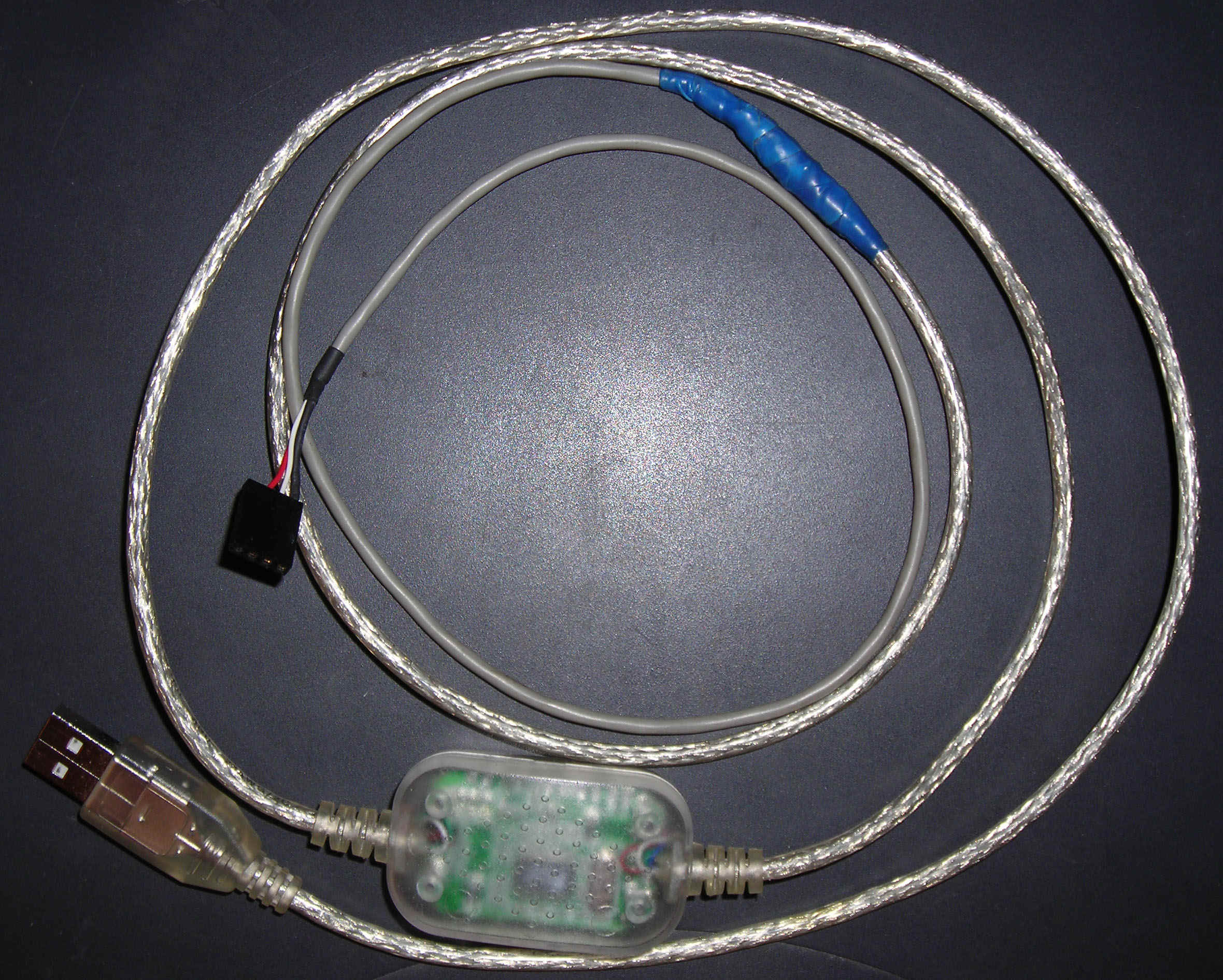
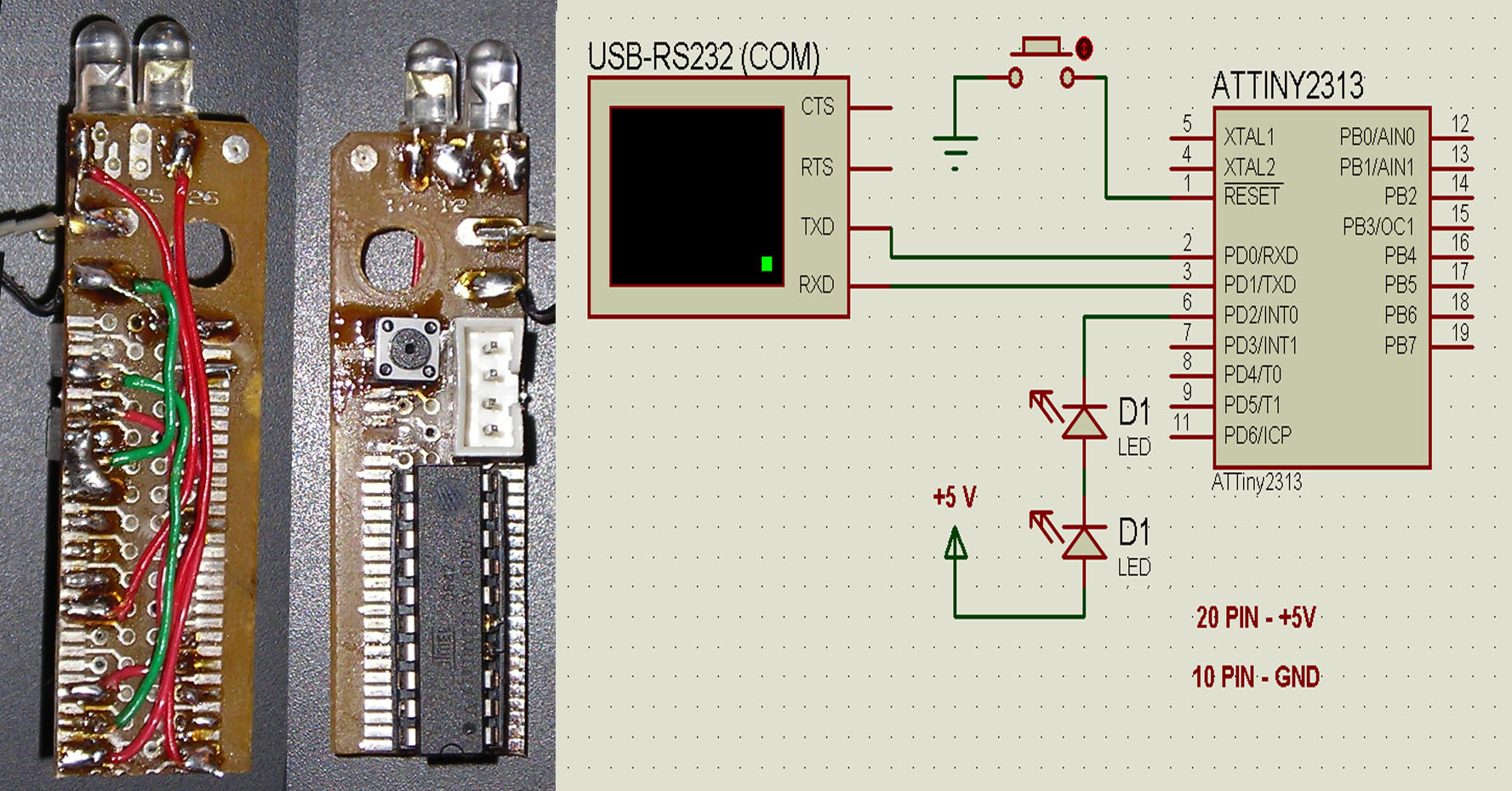
1. Берем шнурок USB-COM (TTL
уровни). Прекрасно подойдет шнурок от телефона на
микросхеме PL2303. Внешний вид такого шнурка
представлен на картинке.
2. Покупаем МК от
Atmel - ATTiny2313. Суть в том, что ATTiny2313 имеет встроенный
кварц и нам не придется напаивать на плату лишние
детали. При покупке МК - покупайте сразу
несколько микросхем так как не каждая микросхема
работает устойчиво. У меня из 10 микросхем
устойчиво работало 7 шт, 2 шт. давали сбои если
подавалось напряжение 4,2В или 5,3В и одна
оказалась вобще нерабочая.
Покупаем 2 ИК
диода (или выковыриваеи их из старых пультов от
ТВ).
Находим один
микропереключатель.
3. Используя макетную плату
напаиваем на нее МК и остальные детали как
показано на рисунке ниже
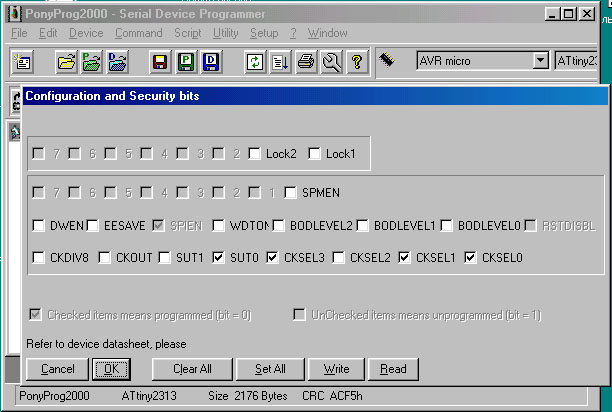
4. Запускаем PonyProg2000 (англ.)
почему-то в русской ATTiny2313 нет и устанавливаем FUSE
в соответствии с рисунком:
5. Заливаем в МК прошивку (в
HOME -> Программатор об этом написано): tiny2313.hex
6. Соединяем USB-RS232 шнурок с
разъемом (или ножками 2 и 3 ATTiny2313).
7. Подаем питание на МК.
8. Втыкаем USB-коннектор
шнурка в компьютер. И слышим мелодичный звук.
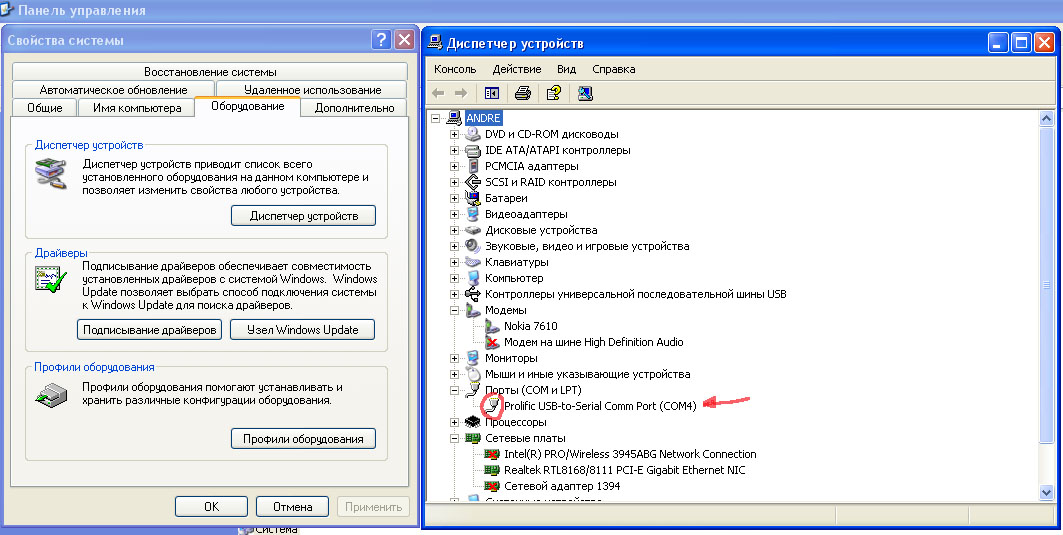
9. Смотрим в Диспетчере
устройств на какой COM сел шнурок:
Нас (нашу программу) устроят
ТОЛЬКО COM-порты от 1 до 4 (com1, com2, com3, com4).
Если устройство повисло на
к-нить другой порт - поробуйте воткнуть в другой
USB-слот, или переназначьте в настройках порта его
номер.
Внимание: устройство передачи ИК работает не
дальше 1,5м от Robosapiena. Мной не ставилась задача
управлять им по всей квартире.
Красная кнопка сверху -
запуск соединения с МК. Если кнопка осталась
красной - воспользуйтесь кнопкой настроек справа
от нее.
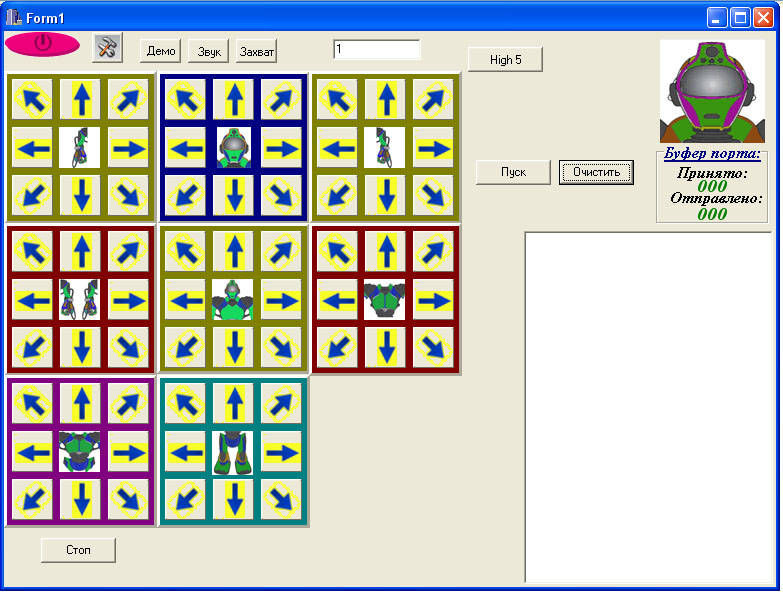
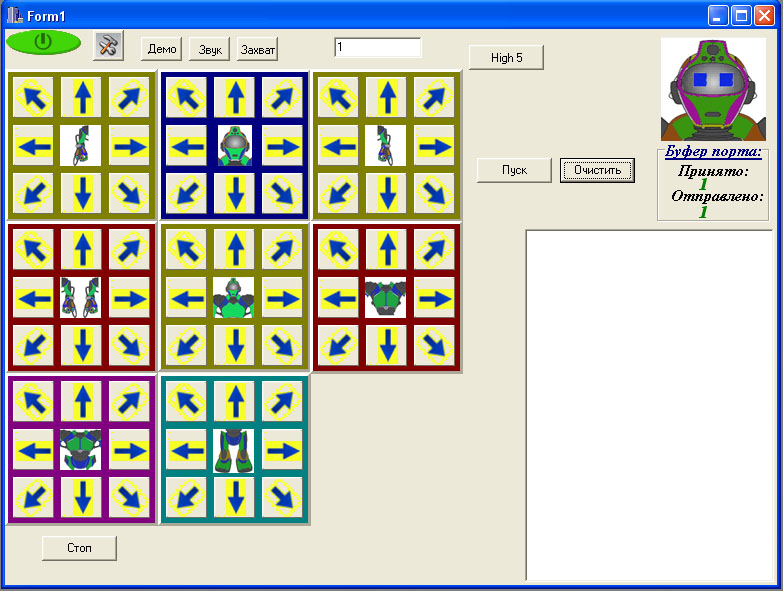
Если все прошло удачно -
программа примет следующий вид:
Нажимая на кнопки
управления вы в реальном времени управляете
Робосапиеном. Справа, в окне редактора
отражается вся последовательность ваших
действий. Вы также можете запустить эту
последовательность в режиме автомата кнопкой
"Пуск". Подача каждой команды на МК
осуществляется через 0,3 сек. Очистить содержимое
окна можно кнопкой "Очистить". Содержимое
окна редактора можно копировать и сохранять в
любом текстовом редакторе, также можно в это окно
копировать из текстового редактора.
Если вы
нажимаете кнопки перемещения RSV2 (панелька с
иконкой ног) то робот будет перемещаться по
комнате до тех пор пока не будет нажата кнопка
"Стоп". Режим перемещения лучше не вносить в
последовательность комманд.
Если вы обратите
внимание - в программе нет панельки "захват
предмета". Это не моя прихоть или оплошность.
Разработчики не включили эту функцию в режим
управления. Захват RSV2 осуществляет только
сложной последовательностью действий. Так что
кроме как повертеть головой, помахать руками ,
побить поклоны, к сожалению, не получиться.
ВНИМАНИЕ! Настройки и содержимое программа не
сохраняет. Данные после завершения программы
будут утеряны.